I have to transform the vertices of a mesh, in CPU RAM, in order to place the mesh in its correct position/rotation in space. While I do this I can fill in the min and max extent along the three dimensions, which serve as the description of the AABB. Should I still use an OBB anyway? What's the norm?
🎉 Celebrating 25 Years of GameDev.net! 🎉
Not many can claim 25 years on the Internet! Join us in celebrating this milestone. Learn more about our history, and thank you for being a part of our community!
AABB vs OBB

What is the correct position and rotation?
Position
If you want to place mesh to have it's center-of-gravity at the origin that is indeed fairly simple (center of gravity is simply calculated by summing all vertices and dividing the resulting value by the number of vertices), i.e.:
float4 centerOfGravity = float4(0.0f, 0.0f, 0.0f, 0.0f);
for (int i = 0; i < mesh.vertices.size(); i++)
{
centerOfGravity += mesh.vertices[i];
}
centerOfGravity /= (float)mesh.vertices.size();You simply translate all vertices by -centerOfGravity (or create transformation matrix for the object with translation -centerOfGravity).
There are of course alternatives (like computing AABB - get centroid of it and use that instead of center of gravity).
Rotation
Now this one is problematic - it depends on - how do you want to rotate your geometry on default? Is it already correctly rotated when exported from 3D editor, or generated? Or do want to find minimal bounding box and rotate in a way, that longest axis is F.e. your Y axis?
Minimal OBB can be found like following
- Calculate the centroid (c0, c1, c2) and the normalized covariance
- Calculate the eigenvectors e0, e1, e2. The reference system basis will be (e0, e1, cross(e0, e1))
- Transform the points into that reference system. Transformation will be given by rotation matrix (e0, e1, cross(e0, e1)) and translation centroid (c0, c1, c2), resulting 4x4 matrix has to be inverted to be used.
- Calculate min, max and center diagonal
- Now, the transformation you have to apply is rotation (e0, e1, cross(e0, e1)) and translation is rotation * center diagonal + centroid (c0, c1, c2)
Note: cross denotes a vector product
If you want more deeper description/understanding of this - look up OBB generation with Principal Component Analysis. Also a bit of knowledge on linear algebra is needed (at least what are eigen vectors and eigen numbers, etc.). With the above you will be able to transform your geometrical model in a way that the model's longest axis is pointing along let's say Y axis, but is that the rotation you're seeking?
Note: As of me - I don't rotate models at all, the moment you import them into my engine, drag them into scene - I place them in a way they were exported from the 3D modelling software. User can then rotate them in any way he wants (with rotation tool).

taby said:
Should I still use an OBB anyway? What's the norm?
For what do you use your bounds? Culling, collision detection, raytracing?
For most cases AABBs are faster, but i've heard OBBs gave a big speedup over AABB for broad phase collision detection in a physics engine.
Vilem Otte said:
Minimal OBB can be found like following Calculate the centroid (c0, c1, c2) and the normalized covariance Calculate the eigenvectors e0, e1, e2. The reference system basis will be (e0, e1, cross(e0, e1)) Transform the points into that reference system. Transformation will be given by rotation matrix (e0, e1, cross(e0, e1)) and translation centroid (c0, c1, c2), resulting 4x4 matrix has to be inverted to be used. Calculate min, max and center diagonal Now, the transformation you have to apply is rotation (e0, e1, cross(e0, e1)) and translation is rotation * center diagonal + centroid (c0, c1, c2) Note: cross denotes a vector product
I see you have experience with this… : )
Here's what i do (it's probably very unusual), e.g. to find best orientation to represent moment of inertia:
Compute center of mass and make it the origin.
Accumulate all points (e.g. weighted triangle centers) to a 3 band spherical harmonic.
Find the average line representing the object from local maxima search in the SH.
Project the object to the plane of that line, so the rest is a 2D problem.
Now, instead SH use complex numbers raised to the second power to quickly calculate the second average line.
It works as expected. Initially i thought i could find the primary direction in SH3 analytically, but i could not get this to work and now i doubt that's possible. (Only for SH2 this is easy)
So i assumed computing Eigen Vectors in a 3x3 matrix might be faster and eventually give similar results.
But i never used Eigen Vectors and i wonder if calculating them is an iterative / expensive process too? Or is it fast?
@JoeJ I can give you a bit of details here (it is “almost worthy of an article”. Copied implementation into Unity just to confirm it is correct. Unlike stating to “use eigen” (insert any other linear algebra library - see note), which I wouldn't consider as a proper answer - as I heavily prefer to at least implement it myself to understand what is actually going on underneath.
Note: I still mostly use my own linear algebra libraries in my projects, which are comparable in speed with large templated libraries (I use SIMD after all) - while I do have used them and recognize them for them being generic and generally quite usable, in my projects I prefer to not use them (mainly to keep source code readable).
Now, time for the description:
How to build Oriented Bounding Boxes
How is it calculated (in pseudo code):
Generate()
{
CalculateCovarianceMatrix();
GenerateEigenVectorBasis();
CalculateCentroidAndBounds();
}Covariance Matrix
The matrix we need to calculate from our vertices is basically this:
Per definition we also know that:
So, in short it can be written as:
Keep in mind that definitions for variance and covariance are:
So, in implementation it will be something like:
private Vector3 Mean(Vector3[] data)
{
Vector3 result = new Vector3(0.0f, 0.0f, 0.0f);
for (int i = 0; i < data.Length; i++)
{
result += new Vector3(data.x, data.y, data.z);
}
if (data.Length > 0)
{
result /= (float)data.Length;
}
return result;
}
private Matrix3x3 CovarianceMatrix(Vector3[] data, Vector3 mean)
{
Matrix3x3 m = new Matrix3x3(0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f);
for (int i = 0; i < data.Length; i++)
{
m.m00 += (data[i].x - mean.x) * (data[i].x - mean.x);
m.m01 += (data[i].x - mean.x) * (data[i].y - mean.y);
m.m02 += (data[i].x - mean.x) * (data[i].z - mean.z);
m.m10 += (data[i].y - mean.y) * (data[i].x - mean.x);
m.m11 += (data[i].y - mean.y) * (data[i].y - mean.y);
m.m12 += (data[i].y - mean.y) * (data[i].z - mean.z);
m.m20 += (data[i].z - mean.z) * (data[i].x - mean.x);
m.m21 += (data[i].z - mean.z) * (data[i].y - mean.y);
m.m22 += (data[i].z - mean.z) * (data[i].z - mean.z);
}
float invN = 1.0f / (float)data.Length;
m.m00 *= invN;
m.m01 *= invN;
m.m02 *= invN;
m.m10 *= invN;
m.m11 *= invN;
m.m12 *= invN;
m.m20 *= invN;
m.m21 *= invN;
m.m22 *= invN;
return m;
}Eigen Vectors
Eigen vector (Characteristic vector) of linear transformation is a nonzero vector that changes by a scalar factor when that linear transformation is applied to it. Formal definition of calculation is:
Where:
- T is linear transformation
- v is eigen vector
- λ is eigen value associated with v
- I is identity
Now, clearly mathematical way end up in polynomial equation (2nd order polynomial in 2D space or 3rd order polynomial in 3D space). As we're operating in 3D space, there “is” analytical way to solve this (Cardano's solution - based on Tartaglia if I remember correctly) - although it isn't generally used that much as it is quite complex approach. This problem is mostly solved numerically.
Standard way to calculate eigen systems from symmetric matrices is QR decomposition. There is also a slick implementation(which I used) by building orthogonal transform out of rotations representing them by quaternion. The implementation is as following (the number of iterations is a bit overshot … also termination conditions could be “X > 0.99 && X < 1.01” instead of "X == 1" … but you get the idea):
public Quaternion Diagonalization()
{
int DIAGONALIZATION_ITERATIONS = 24;
Quaternion q = new Quaternion(0.0f, 0.0f, 0.0f, 1.0f);
for (int i = 0; i < DIAGONALIZATION_ITERATIONS; i++)
{
// v * Q == q * v * conj(q)
Matrix3x3 Q = new Matrix3x3(Matrix4x4.Rotate(q));
// A = transpose(Q) * D * Q
Matrix3x3 D = Q * this * Matrix3x3.Transpose(Q);
// Non diagonal elements
Vector3 offdiag = new Vector3(D.m12, D.m02, D.m01);
// Magnitude of each off diagonal element
Vector3 om = new Vector3(Mathf.Abs(offdiag.x), Mathf.Abs(offdiag.y), Mathf.Abs(offdiag.z));
// Find largest off-diagonal value
int k = (om.x > om.y && om.x > om.z) ? 0 : (om.y > om.z) ? 1 : 2;
int k1 = (k + 1) % 3;
int k2 = (k + 2) % 3;
// Already diagonal - exit iterative computation
if (offdiag[k] == 0.0f)
{
break;
}
float theta = (D.GetElement(k2, k2) - D.GetElement(k1, k1)) / (2.0f * offdiag[k]);
// Make theta positive
float sgn = (theta > 0.0f) ? 1.0f : -1.0f;
theta *= sgn;
float t = sgn / (theta + ((theta < 0.000001f) ? Mathf.Sqrt(theta * theta + 1.0f) : theta));
float c = 1.0f / Mathf.Sqrt(t * t + 1.0f);
// Cannot get better anymore
if (c == 1.0f)
{
break;
}
// Jacobi rotation for this iteration
Quaternion jr = new Quaternion(0.0f, 0.0f, 0.0f, 0.0f);
// Half angle identity - sin(a / 2) = sqrt((1 - cos(a)) / 2)
jr[k] = sgn * Mathf.Sqrt((1.0f - c) / 2.0f);
// As our quat-to-matrix convention was v * M, instead of M * v
jr[k] *= -1.0f;
jr.w = Mathf.Sqrt(1.0f - jr[k] * jr[k]);
// Reached limit of floating point precision - terminate
if (jr.w == 1.0f)
{
break;
}
q = q * jr;
q.Normalize();
}
return q;
}Now, the resulting quaternion of this diagonalization is representing spatial rotation into the space of eigen vectors for given matrices. To build up eigen vectors basis you can literally do:
public bool EigenVectors(out Vector3 x, out Vector3 y, out Vector3 z)
{
Quaternion q = Diagonalization();
Matrix3x3 m = new Matrix3x3(Matrix4x4.Rotate(q));
x = new Vector3(m00, m10, m20);
y = new Vector3(m01, m11, m21);
z = new Vector3(m02, m12, m22);
float xMag = Vector3.Magnitude(x);
float yMag = Vector3.Magnitude(y);
float zMag = Vector3.Magnitude(z);
// Here we can handle special cases
if (xMag > 0.0001f && yMag > 0.0001f && zMag > 0.0001f)
{
// All vectors exist
and have some length
}
else if (xMag < 0.0001f && yMag > 0.0001f && zMag > 0.0001f)
{
// When one vector is 0, calculate last one as cross product of the other 2
x = Vector3.Cross(y, z);
}
else if (xMag > 0.0001f && yMag < 0.0001f && zMag > 0.0001f)
{
// When one vector is 0, calculate last one as cross product of the other 2
y = Vector3.Cross(x, z);
}
else if (xMag > 0.0001f && yMag > 0.0001f && zMag < 0.0001f)
{
// When one vector is 0, calculate last one as cross product of the other 2
z = Vector3.Cross(x, y);
}
else
{
// When 2 or more vectors are 0, use identity basis (there are better solutions, but I didn't want to dig into details too much)
x = new Vector3(1.0f, 0.0f, 0.0f);
y = new Vector3(0.0f, 1.0f, 0.0f);
z = new Vector3(0.0f, 0.0f, 1.0f);
}
// To handle issues with numerical precision, iteratively orthonormalize
for (int i = 0; i < ORTHONORMALIZATION_ITERATIONS; i++)
{
Vector3.OrthoNormalize(ref x, ref y, ref z);
// Check whether we are orthogonal - if so, break the loop
float dp = Mathf.Abs(Vector3.Dot(x, y) + Vector3.Dot(x, z) + Vector3.Dot(y, z));
if (dp < 0.001f)
{
break;
}
}
return true;
}This code could be further improved by handling cases where 2 or more vectors are equal (just adding few branches into special cases) to make it proper, full featured solution.
Once we have this basis, it is technically quite straightforward:
Calculate Centroid and Bounds
This is as straightforward as it can get:
Vector3 centroid = new Vector3();
Vector3 min = new Vector3();
Vector3 max = new Vector3();
for (int i = 0; i < vertices.Length; i++)
{
Vector3 projected = new Vector3();
projected.x = Vector3.Dot(vertices[i], eigen_basis[0]);
projected.y = Vector3.Dot(vertices[i], eigen_basis[1]);
projected.z = Vector3.Dot(vertices[i], eigen_basis[2]);
if (i == 0)
{
min.x = projected.x;
min.y = projected.y;
min.z = projected.z;
max.x = projected.x;
max.y = projected.y;
max.z = projected.z;
}
else
{
min.x = Mathf.Min(min.x, projected.x);
max.x = Mathf.Max(max.x, projected.x);
min.y = Mathf.Min(min.y, projected.y);
max.y = Mathf.Max(max.y, projected.y);
min.z = Mathf.Min(min.z, projected.z);
max.z = Mathf.Max(max.z, projected.z);
}
centroid += projected;
}
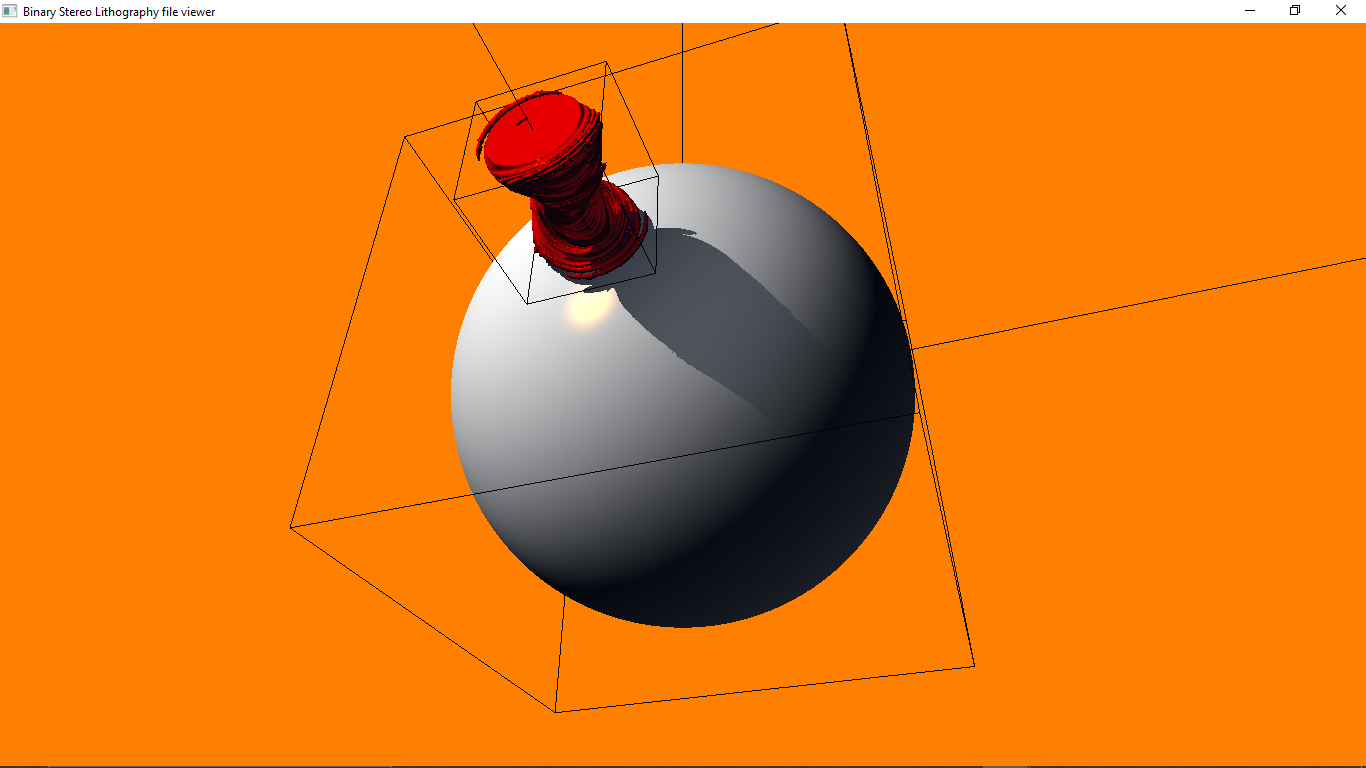
centroid /= (float)vertices.Length;Results
The result looks like (I drew basis and oriented bounding boxes):
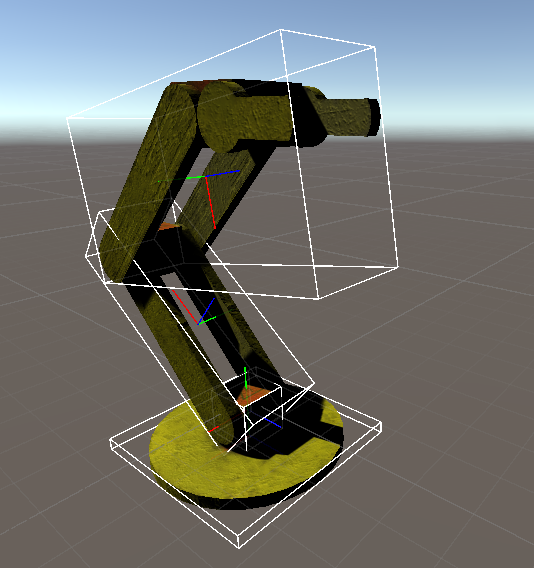
Now, the problem I have with OBBs is that they don't seem that useful (yes, definitely for physics, but in computer graphics we generally prefer to use AABBs). There might be some exceptions like:
- Bounding Volume Hierarchies - in case on uses Multi-Level BVHs, the bottom level could originate from OBB (as it would just update transformation matrix for Top-level BVHs). This could yield some performance gain in most cases - I have never studied it as I never considered this to be worth in the end (if I was a teacher I'd say this might be interesting thesis topic). The performance hit would be negligible (as you have to calculate OBB only once per geometry (or re-build for deformed one)).
So yes, they do have their place, as well as this-like code has place in my linear algebra library for my projects.

Author
Hi @joej , I’m using it for mouse picking, to see if the ray intersects with the AABB before it goes on to do ray-triangle intersection.
Author
@vilem otte Holy cow. Yes eigenvectors are used in beginner’s quantum physics. Thank you so much for your time and knowledge!!! The eigenvalues demonstrate the cyclical nature of… nature. Surely you know General Relativity, with your knowledge of covariant matrices, and such?
Vilem Otte said:
@JoeJ I can give you a bit of details here
Wow, thanks!
Having only the minimum math education it's really hard for me to learn, so this is priceless help.
This will help to understand MPM fluid sim, which i currently work on. But first i'll see if it is an alternative for my SH method (which i use to build surfel hierarchy not inertia), and maybe it also works to create smooth hexagonal fields, useful for volumetric remeshing for destruction.
So you see, your time should be invested well… : D

This topic is closed to new replies.
Advertisement
Popular Topics


Advertisement